

تجهیزات اندازه گیری موقعیت و سرعت برای بدست آوردن دو کمیت جابجایی و سرعت می باشد که این دو به هم وابسته هستند و اندازه گیری یک کمیت، ممکن است برای بدست آوردن کمیت دیگر مورد استفاده قرار گیرد. اندازه گیری حرکت نسبی قطعات یا دستگاه ها کاربرد های فراوانی دارد. با دانستن اینکه یک دستگاه با چه سرعتی حرکت می کند می توان آن را سریعتر و با اورشوت کمتری نسبت به حالتی که تنها از روش ساده موقعیت استفاده شود در موقعیت خاصی قرار داد.
تجهیزات اندازه گیری موقعیت و سرعت
تعیین موقعیت یک جسم در بیشتر سیستم های کنترلی از اهمیت خاصی برخوردار است. به عنوان مثال دستگاههای اتوماتیک نصب قطعات با استفاده از روبات ها نیاز به تعیین دقیق موقعیت دارند. به منظور اندازه گیری، موقعیت جابجای و سرعت، روش های متعددی وجود دارد که برخی از این روش ها عبارت است از :
- LVDT
- RVDT
- رمز گذار چرخشی
- رمز گذار موقعیت
- تاکومتر ژنراتور
- دور سنج های نوری
- پتانسیومتر های اندازه گیری موقعیت
- ترانسدیوسر های تغییر مکان خازنی
- سنسور های حرکت اثر هال
Linear Variable Differential Transformer) LVDT)
LVDT به معنای ترانسفورماتور دیفرانسیلی متغیر خطی می باشد. LVDT تجهیزی الکترو مکانیکی می باشد که دارای خروجی الکتریکی متناسب با جابجایی یک هسته مغناطیسی متحرک می باشد. این تجهیز از یک هسته مغناطیسی و ترانسفورماتوری با یک سیم پیچ اولیه و دو سیم پیچ ثانویه که به طور متقارنی به یکدیگر اتصال داده شده اند، تشکیل شده است.
شکل زیر سطح مقطع برش خورده یک LVDT را نشان می دهد.
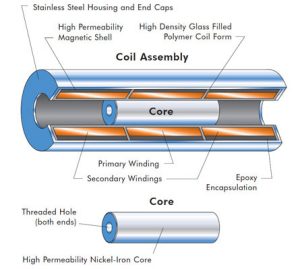
سطح مقطع برش خورده یک LVDT
در صورتی که سیم پیچ اولیه LVDT توسط یک ولتاژ متناوب تغذیه شود به دلیل وجود هسته مغناطیسی در میان سیم پیچی ها، جابجایی هسته که توسط یک واسط غیر مغناطیسی به جسم متحرک متصل است، باعث تغییر در شار عبوری و در نتیجه تغییر در ولتاژ القایی سیم پیچی های ثانویه شده و ولتاژ خروجی که تفاضل ولتاژ القایی دو سیم پیچ ثانویه می باشد نیز تغییر می کند.
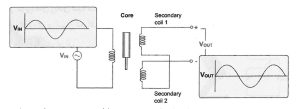
مکانیزم کاری LVDT
ولتاژ موثر (rms) خروجی به طور خطی با موقعیت هسته مغناطیسی نسبت به ترانسفورماتور تغییر می کند. منحنی زیر تغییر ولتاژ موثر را نسبت به موقعیت هسته نشان می دهد.
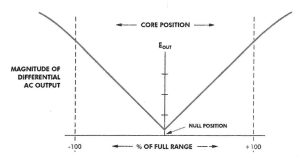
منحنی تغییرات ولتاژ موثر نسبت به موقعیت هسته
با دقت در این منحنی دیده می شود که ولتاژ خروجی در نقطه مبدأ (هنگامی که هسته در وسط سیم پیچ های ثانویه قرار دارد) صفر نمی باشد، و دارای یک Offset است که علت این Offset، وجود اندکتانس نشتی و تزویج ناقص است و با این سیگنال خروجی فقط امکان اندازه گیری فاصله هسته نسبت به مرکز میسر می باشد. البته می توان با بکار گیری یک فیلتر یکسو ساز این مشکلات را بر طرف کرد و امکان اندازه گیری جهت و فاصله هسته نسبت به مرکز را فراهم کرد. شکل زیر نحوه اتصال یکسو ساز را به LVDT همراه با سیگنال خروجی یکسو ساز نشان می دهد.
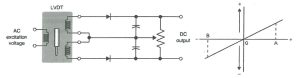
نحوه اتصال یکسو ساز به LVDT
در منحنی بالا فاصله از طریق اندازه گیری دامنه سیگنال خروجی تعیین می گردد و تعیین جهت هسته نسبت به مبدأ با اندازه گیری علامت (مثبت و منفی بودن) ولتاژ DC خروجی میسر می باشد. کاربرد اصلی LVDT ها برای تعیین موقعیت می باشد اما مزایای بسیار زیاد سبب بکار گیری از آنها در کاربرد های زیادی شده است. از جمله این کاربرد ها می توان موارد زیر را ذکر کرد :
کاربرد LVDT
- اندازه گیری میزان انحراف دینامیکی در فشار سنج ها و سایر دستگاههای اندازه گیری
- اندازه گیری لرزش
- اندازه گیری کشش مواد با انعطاف پذیری بالا
شکل زیر نمونه ای از کاربرد LVDT را نشان می دهد.
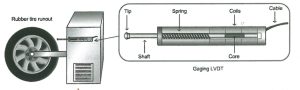
کاربرد LVDT
مزایای استفاده از LVDT
- نداشتن اصطکاک به دلیل عدم اتصال فیزیکی بین هسته متحرک و ساختمان بوبین ها
- حساسیت و دقت بالا
- دارای خروجی خطی
- سادگی ساختمان و قیمت پایین
- عمر بالا به دلیل عدم اصطکاک
- مناسب برای بکار گیری در محیط های تحت فشار و خورنده با مایعات اسیدی، به دلیل مجزا بودن هسته از سیم پیچ ها
- قابلیت تکرار پذیری بسیار خوب
- پاسخ دینامیکی بسیار سریع
Rotary Variable Differential Transmitter) RVDT)
RVDT به معنی ترانسفورماتور دیفرانسیلی متغیر چرخشی می باشد. عملکرد این تجهیز مشابه LVDT است با این تفاوت که در این تجهیز سیم پیچ های ترانسفورماتور بر روی یک استاتور دوار و یک شفت به عنوان هسته مغناطیسی عمل می نماید، که نتیجه این ساختمان اندازه گیری موقعیت زاویه ای می باشد. دقت شود که رنج RVDT ها معمولاً محدوده 40-+ درجه می باشد، اما می توان رنج آنها را با استفاده از گیربکس افزایش داد.

RVDT
ویژگی های اصلی RVDT ها
- خروجی پیوسته
- سادگی ساختمان و قیمت پایین
- اندازه گیری موقعیت مطلق
- رنج اندازه گیری 40 درجه و قابل افزایش به کمک گیربکس
- دقت و حساسیت بالا
- خروجی خطی (میزان غیر خطی بودن کمتر از 0.5 درصد در مقیاس کامل)
رمزگذار چرخشی (Rotary Encoder)
رمزگذار نوری یا همان انکودر نوری یک ترانسدیوسر اندازه گیری موقعیت زاویه ای یا سرعت چرخشی می باشد. نوع ساده این تجهیز مطابق شکل از یک دیسک گردان شکاف دار، یک منبع نوری و یک آشکار ساز حساس به نور تشکیل شده است.

انکودر نوری
شکاف های روی دیسک انکودر های نوری باعث قطع و وصل نور تابیده شده به آشکار ساز می شود. البته در برخی از انکودر های نوری به جای استفاده از دیسک سوراخ دار از دیسک های آینه ای با تقسیم بندی سیاه و سفید استفاده می شود که در این نوع انکودر ها منبع نور و آشکار ساز هر دو در یک سمت دیسک نصب می شوند، در صورتی که در دیسک های سوراخ دار منبع نور و آشکار ساز در دو طرف دیسک نصب می شوند. آشکار ساز منبع نور معمولاً یک فتوترانزیستور است که خروجی این فتوترانزیستور مانند مدار شکل زیر به بخش آماده سازی سیگنال متصل می شود که توسط یک مدار اشمیت تریگر پالس های خروجی فتوترانزیستور به یک موج مربعی تبدیل می شود.
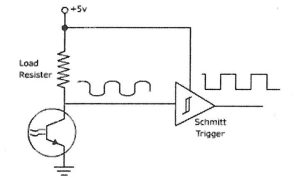
مدار خروجی انکودر
در حالت کلی دو نوع انکودر نوری وجود دارد که عبارتند از:
- افزایشی (Incremental)
- مطلق (Absolute)
برای اطلاعات بیشتر مقاله آشنایی کامل با انکودر ها را مطالعه کنید.
رمزگذار موقعیت (Position Encoder)
رمز گذار موقعیت به منظور کنترل موقعیت در مسیر های مختلف مورد استفاده قرار می گیرد. اساس کار این تجهیز مانند انکودر های چرخشی می باشد، اما این تجهیز در مسیر خطی، خواندن کد های موقعیت را انجام می دهد. این رمز گذار برای اندازه گیری موقعیت از یک بارکد خوان فتو الکتریک و یک ریل کد شده استفاده می نماید. این ریل از فولاد ضد زنگ یا پلاستیک ساخته می شود و موازی با مسیر حرکت تجهیز به صورت ثابت نصب می شود. شکل زیر ریل کد شده و بارکد خوان فتو الکتریک را نشان می دهد.

رمزگذار موقعیت
تاکومتر ژنراتور (Tachometer Generator)
ترانسدیوسر های اندازه گیری سرعت زاویه ای به طور معمول به دو دسته تقسیم می شوند، دسته ای که در خروجی، ولتاژی به صورت تابعی از سرعت چرخشی تولید می کنند و دسته ای که فرکانس خروجی شان بستگی به سرعت چرخش دارد. معمول ترین ترانسدیوسر سرعت زاویه ای، تاکومتر الکترو مغناطیسی یا همان تاکو ژنراتور می باشد. که در آن یک میدان مغناطیسی به وسیله یک مغناطیس دائم یا سیم پیچ تحریک مجزا روی استاتور، تأمین می شود و روتور از یک سری سیم پیچ تشکیل شده است.
هنگام چرخش روتور در میدان مغناطیسی، در سیم پیچ ها ولتاژی القا می گردد. دامنه EMF القا شده در سیم ،پیچ ها، متناسب با سرعت چرخش روتور می باشد. با اتصال چندین سیم پیچ به صورت سری و چرخاندن آنها درون میدان های چندگانه، خروجی بزرگ و تقریباً بدون ریپلی بدست خواهد آمد و این سیگنال از طریق جاروبک و کموتاتور، DC شده و به خارج ارسال می گردد. لازم به ذکر است که تعویض جهت چرخش، سبب معکوس شدن پلاریته ولتاژ خروجی می شود. شکل زیر چند نمونه تاکومتر را نشان می دهد.

نمونه هایی از تاکومتر
بیشتر سازندگان، تاکومتر های DC را بر اساس ولتاژ خروجی تولید شده نسبت به سرعت چرخشی، به چندین سری به شرح زیر دسته بندی می کنند.

دسته بندی تاکومتر های DC بر اساس ولتاژ خروجی نسبت به سرعت چرخش
مزایا و معایب استفاده از تاکومتر DC
تاکومتر های DC کاربرد زیادی دارند، دلیل این امر مزایای زیاد این تاکومتر ها می باشد که عبارتند از:
- استفاده از آنها آسان می باشد.
- ولتاژ خروجی DC نسبتاً زیادی تولید می کنند و دیگر نیازی به مدار های تنظیم کننده نمی باشد.
عیب تاکومتر های DC وجود جاروبک و کموتاتور می باشد که سبب ایجاد مشکلات زیر می شود:
- نیاز به نگهداری پیوسته دارند.
- ایجاد جرقه در جاروبک ها تولید تداخل فرکانس رادیویی می کند که نیاز می باشد بقیه سیستم از آن محافظت شود.
تاکومتر های القایی AC
برای سیستم هایی که مشکلات مربوط به جاروبک ها غیر قابل قبول می باشد، می توان از تاکومتر های القایی AC استفاده کرد، که فاقد جاروبک می باشند.
تاکومتر های AC شامل سیم پیچ های اولیه و ثانویه می باشند که به صورت عمود بر هم بر روی استاتور نصب شده اند. روتور این تاکومتر ها از فلزی با قابلیت هدایت بالا ساخته می شوند. زمانی که ولتاژی با فرکانس 50 هرتز به سیم پیچ اولیه متصل شود یک جریان گردابی (Eddy Current) در جهت عمود بر سیم پیچ در روتور القا خواهد شد. وقتی روتور ثابت باشد میدان مغناطیسی منتج از این جریان ها در روتور عمود بر سیم پیچ ثانویه می باشد. این میدان، سیم پیچ ثانویه را قطع نمی کند بنابراین هیچ سیگنالی به ثانویه القا نخواهد شد. اما در صورتی که روتور بچرخد این میدان در عرض ثانویه حرکت نموده و ولتاژی در خروجی القا می کند.
هر چه روتور سریع تر بچرخد میدان القا شده در روتور سریع تر ثانویه را قطع کرده و در نتیجه ولتاژ بیشتری در ثانویه القا خواهد شد. خروجی تاکومتر های AC، ولتاژ متناوب می باشد بنابراین می بایست آن را یکسو و سپس فیلتر نمود تا به یک سیگنال مفید تبدیل شود. با توجه به اینکه اولیه و ثانویه عمود بر یکدیگر می باشند خروجی با ولتاژ تحریک اختلاف فاز 90 درجه دارد. وقتی در یک جهت دوران نمایند، خروجی نسبت به تحریک پیش فاز خواهد شد و در صورتی که جهت چرخش عکس شود، ولتاژ خروجی 180 درجه تغییر فاز می دهد. در نتیجه خروجی نسبت به منبع، 90 درجه پیش فاز می شود.
نکته
تاکومتر های القایی AC بر مشکلات مربوط به تاکومتر های DC غلبه نموده اند، اما نیاز به یک مدار یکسو ساز و فیلتر حساس به فاز برای ایجاد سیگنال مفید دارد.
دور سنج های نوری
دور سنج های نوری تجهیزاتی جهت اندازه گیری سرعت چرخشی یا سرعت خطی به صورت سیار می باشند. عملکرد دور سنج های نوری شبیه به سنسور های نوری رفلکتوری می باشد. به این صورت که یک فرستنده نوری و گیرنده نوری در داخل دور سنج در کنار یکدیگر نصب شده، حال در صورتی که یک برچسب رفلکتوری را طوری روی محور در حال چرخش بچسبانیم که تنها بخشی از محیط محور را پوشش دهد، با قرار دادن دور سنج روبروی بر چسب رفلکتوری، نور منتشر شده توسط فرستنده دور سنج توسط رفلکتور بازتاب شده و گیرنده دور سنج آن را دریافت می نماید. در نتیجه در صورتی که محور در حال چرخش باشد پرتو های نوری که به گیرنده می رسند متناوباً قطع و وصل می شوند و یک سیگنال مربعی تولید می کنند و دور سنج با اندازه گیری فرکانس سیگنال مربعی تولید شده، می تواند سرعت محور در حال چرخش را محاسبه کند.
لازم به ذکر است که در این نوع دور سنج ها می توان توسط قطعه مکانیکی که در داخل آن یک رفلکتور نصب شده است به طور مکانیکی نیز سرعت خطی و چرخشی را اندازه گیری کرد. شکل زیر چند نمونه دور سنج را نشان می دهد.

نمونه هایی از چند مدل دور سنج
پتانسیومتر های اندازه گیری موقعیت
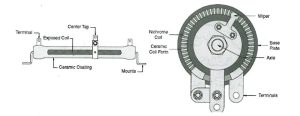
پتانسیومتر عموماً شامل عنصر مقاومتی است که یک اتصال متحرک لغزان در آن تعبیه شده است. اتصال متحرک عبارت است از بازوی متحرکی که می تواند روی مسیر مقاومتی بلغزد. بنابراین بین یک انتهای مسیر سیم پیچی شده و اتصال لغزان، مقاومت متغیری به وجود می آید. حرکت اتصال لغزان می تواند خطی یا چرخشی باشد. از اتصال لغزان می توان به عنوان کنترل موقعیت استفاده کرد اما برای این کاربرد نیاز به شناخت دقیقی از عملکرد پتانسیومتر می باشد که در ادامه به این موضوع پرداخته شده است.
شکل زیر چند نمونه پتانسیومتر را که می توانند به عنوان کنترل موقعیت استفاده شوند نشان می دهد.

نمونه ای از چند مدل پتانسیومتر
به طور معمول پتانسیومتر های خطی دارای بستر لغزش بین ۵ تا ۱۰۰۰ میلی متر و پتانسیومتر های چرخشی دارای فاصله انحراف بین ۱۰ تا ۶۰ دور می باشند.
نمونه ای از یک پتانسیومتر خطی و چرخشی
مزایای استفاده از پتانسیومتر سهولت در استفاده، سادگی ساختمان و قیمت پایین می باشد اما عیب اصلی پتانسیومتر ها مسئله نویز در آن می باشد. عامل اصلی نویز در پتانسیومتر ها نوسانات ولتاژ است، این نوسانات ناشی از لرزش لغزنده پتانسیومتر، کثیف شدن اتصال لغزنده به پتانسیومتر و فرسوده شدن اتصال لغزنده و یا پتانسیومتر می باشد.
ترانسدیوسر های تغییر مکان خازنی
ظرفیت خازنی وقتی به وجود می آید که دو جسم هادی الکتریکی توسط یک عایق دی الکتریک از هم جدا شده باشند. خازن ها شامل دو صفحه موازی به مساحت A بوده که به فاصله d از یکدیگر قرار دارند، آنگاه ظرفیت خازن (C) از رابطه زیر بدست می آید.
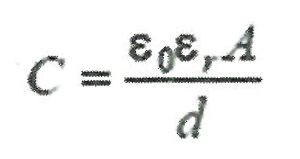
رابطه محاسبه ظرفیت خازن
در این رابطه E0 ضریب گذردهی خلأ است ( 12-^10 * 8.85) و Er ضریب گذردهی نسبی ماده دی الکتریک می باشد که صفحات هادی را از یکدیگر جدا می کند. در هوای خشک مقدار 1 = Er در نظر گرفته می شود بنابراین ظرفیت در یک خازن، تابعی از مشخصات هندسی (A و d) و جنس ماده دی الکتریک می باشد. در نتیجه هر تغییری در مقدار d ، A و یا Er سبب تغییر در ظرفیت خازن می گردد، که با استفاده از تغییر در این پارامتر ها می توان سنسور های اندازه گیری موقعیتی که تغییرات موقعیت خیلی کوچکی (کمتر از 2 میلی متر) دارند را ساخت.
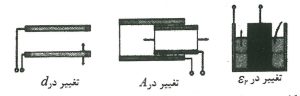
چگونگی تغییرات ظرفیت خازن
دقت شود که کاربرد روش فوق فقط در اندازه گیری موقعیت و جابجایی نمی باشد، بلکه می توان در سایر دستگاه های ابزار دقیق مانند فشار سنج ها و شتاب سنج ها نیز از اندازه گیر های خازنی بهره برد. در عمل معمولاً استفاده از تنها دو صفحه چندان مناسب نیست، علت این امر ایجاد خروجی غیر خطی می باشد که می توان از آرایش تفاضلی سه صفحه ای مطابق شکل زیر استفاده کرد.

استفاده از آرایش تفاضلی سه صفحه ای در ترانسدیوسر های تغییر مکان خازنی
ترانسدیوسر خازنی در اندازه گیری جابجایی های کوچک، دقت و حساسیت بسیار بالایی دارد. علاوه بر آن، میدان های مغناطیسی که معمولاً در محیط های صنعتی وجود دارد تأثیری بر کار این اندازه گیر ندارد. البته این ترانسدیوسر ها به تغییر رطوبت محیط حساس بوده به همین دلیل بیشتر استفاده از آنها به سنسور های فشار و شتاب محدود می شود که در آنها المان خازنی در محفظه خلا یا فشار گاز خشک، آب بندی شده است.
سنسور های حرکت اثر هال (Hall Effect Sensor)
در صورتی که جسمی هادی یا نیمه هادی که حامل جریان الکتریکی می باشد در یک میدان مغناطیسی به شدت B، که عمود بر جهت جریان عبوری می باشد قرار گیرد، ولتاژی به مقدار V ناشی از اثر هال در عرض هادی تولید می شود که به ولتاژ هال معروف می باشد. علت پدید آمدن این ولتاژ این است که در اثر میدان مغناطیسی، انحرافی در حامل های جریان ایجاد می شود و حامل های جریان اضافی روی یک لبه قطعه ظاهر می شوند و در لبه مخالف کمبود حامل اتفاق می افتد، این عدم تعادل بار، ایجاد ولتاژ هال می نماید. تا زمانی که میدان مغناطیسی وجود داشته باشد و جریان نیز بر قرار باشد ولتاژ هال پایدار می باشد.

مکانیزم بوجود آمدن ولتاژ هال
برای اطلاعات بیشتر مقاله آشنایی با سنسور های اثر هال را مطالعه کنید.