

انکودر یکی از قطعات پر کاربرد در صنایع امروزی می باشد که با استفاده از آن می توان کمیت های فیزیکی را به پالس های الکتریکی تبدیل و از این پالس ها برای تعیین موقعیت و کنترل الکترو موتور ها و ماشین افزار ها از آن استفاده کرد.
انکودر (Encoder)
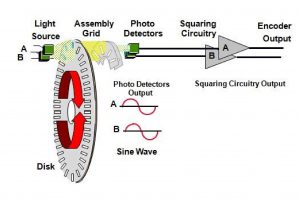
یک انکودر به عنوان ترانسدیوسر اندازه گیری موقعیت زاویه ای یا سرعت چرخشی شناخته می شود. نوع ساده این تجهیز مطابق شکل زیر از یک دیسک گردان شکاف دار، یک منبع نوری و یک آشکار ساز حساس به نور تشکیل شده است.

مکانیزم ساده داخل انکودر
به عبارت دیگر انکودر یک نوع سنسور حرکت است. اگر حرکتی که انکودر تشخیص می دهد از نوع دورانی باشد به آن انکودر زاویه یا دوار (Rotary Encoder) می گوییم و اگر حرکتی که انکودر تشخیص می دهد از نوع خطی باشد به آن انکودر خطی (Linear Encoder) می گوییم. علت اصلی به کار بردن انکودر در صنایع مختلف، گرفتن فیدبک (feedback) یا بازخورد از محیط است و با استفاده از آن میتوان یک سیستم حلقه بسته (close loop) ایجاد کرد.
نحوه عملکرد انکودر
در واقع انکودرها حرکت مکانیکی را به یک سیگنال الکتریکی تبدیل میکنند. سیگنال خروجی تولید شده توسط سیستم های کنترلی مختلف از جمله PLC ها قابل خواندن است. سیستم های کنترلی با استفاده از سیگنال دریافتی از انکودر می توانند سرعت، جهت، موقعیت، تعداد پالس و یا موارد دیگری را تعیین کنند.
انواع انکودر از نظر ساختمان
- انکودر خطی (Linear Encoder)
این نوع از انکودرها برای سنجش موقعیت کاربرد دارند. در واقع چنانچه حرکتی که انکودر حس می کند از نوع خطی باشد، انکودر خطی نامیده می شود. کاربرد عمده این دسته از انکودرها در دو زمینه اندازه گیری (مانند کولیس ها) و استفاده در سیستم های حرکتی (مانند دستگاه های CNC) می باشد. به انکودرهای خطی، خط کش پالسی یا خط کش دیجیتالی نیز گفته می شود. این انکودرها مشابه انکودر های افزایشی هستند با این تفاوت که به جای استفاده از صفحه دایره ای شکل در آن ها از یک خط کش مستقیم استفاده می شود. دقت اندازه گیری در این انکودرها با استفاده از فاصله بین سوراخ های خط کش تعیین می شود.

انکودر خطی
تکنولوژی ساخت انکودر های خطی عبارتند از : نوری، القایی، مغناطیسی، خازنی و جریان گردابی.
- انکودر چرخشی (Rotary Encoder)
شکاف های روی دیسک گردان در انکودرهای نوری باعث قطع و وصل نور تابیده شده به آشکار ساز می شود که در این حالت منبع نور و آشکار ساز در دو طرف دیسک نصب می شوند.
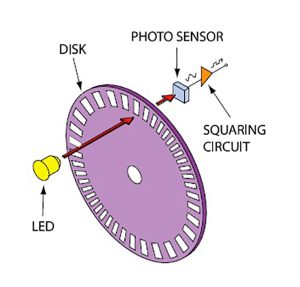
دیسک گردان شکاف دار، منبع نوری و آشکار ساز در انکودر چرخشی
البته در برخی از انکودرهای نوری به جای استفاده از دیسک سوراخ دار از دیسک های آینه ای با تقسیم بندی سیاه و سفید استفاده می شود که در این نوع انکودرها، منبع نور و آشکار ساز هر دو در یک سمت دیسک نصب می شوند. آشکار ساز منبع نور معمولاً یک فتو ترانزیستور است که خروجی این فتو ترانزیستور مانند مدار شکل زیر به بخش آماده سازی سیگنال متصل می شود که توسط یک اشمیت تریگر، پالس های خروجی فتو ترانزیستور را به یک موج مربعی تبدیل می کند.
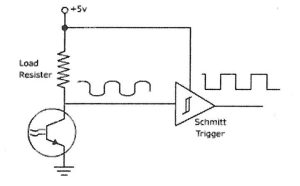
مدار آماده سازی سیگنال خروجی انکودر
انواع انکودر از نظر سیگنال خروجی
در حالت کلی انکودرهای نوری از نظر سیگنال خروجی، به دو مدل تقسیم می شوند که عبارتند از :
- افزایشی (Incremental)
- مطلق (Absolute)
انکودر افزایشی (Incremental Encoder)
در انکودر افزایشی، در صورت چرخش شفت انکودر به اندازه معین تنها یک پالس در خروجی تولید می شود. شکل زیر فرم ساده یک نمونه دیسک انکودر افزایشی را نشان می دهد.
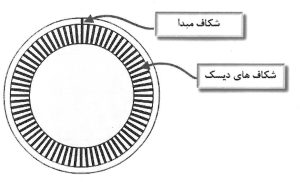
شکل ساده دیسک انکودر افزایشی
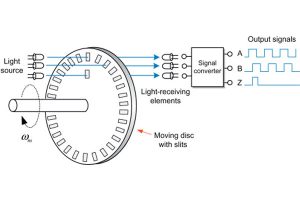
پالس های خروجی حاصل از آشکار ساز، سرعت چرخش دیسک را نشان می دهد که میتوان با شمارش این پالس ها، سرعت چرخش دیسک را محاسبه کرد. فرکانس این پالس بستگی به تعداد شکاف های روی دیسک و سرعت چرخش دیسک دارد. هر چه تعداد شکاف ها بر روی دیسک بیشتر باشد رزولوشن (حد تفکیک پذیری) انکودر بهتر می باشد. بر روی دیسک های انکودر افزایشی یک شکاف مجزا به نام Z نیز وجود دارد که این شکاف دو وظیفه را انجام می دهد، یکی نشان دهنده یک دور چرخش کامل شفت انکودر است و دیگری تعیین مبدأ چرخش می باشد. با دقت در دیسک بالا مشخص است که این دیسک توانایی تشخیص جهت چرخش را ندارد که این مشکل را می توان توسط دو ردیف شیار (Track A و Track B) و دو عنصر حس کننده برطرف کرد.
شیارها به گونه ای نصب شده اند که خروجی های الکتریکی آنها بستگی به جهت چرخش داشته باشد و مطابق با جهت چرخش دیسک، جابجایی فاز آنها به صورت پیش فاز یا پس فاز خواهد بود. به این صورت که اگر Track B قبل از Track A فعال شود جهت چرخش ساعت گرد می باشد و در صورتی که Track A قبل از Track B فعال شود جهت چرخش پاد ساعت گرد می باشد. در نتیجه در خروجی این نوع دیسک سه نوع پالس مطابق شکل زیر می باشد.
نمودار اختلاف فاز سه پالس خروجی انکودر
همان طور که بیان شد پالس Z در هر دور تنها یک بار تولید می شود و به عنوان مبدأ چرخش در نظر گرفته می شود اما پالس های A و B در هر دور چندین بار تولید می شوند. هر چه تعداد این پالس ها بیشتر باشد (رزولوشن بالاتر) حد تفکیک بهتری بدست می آید. انکودرهای امروزی به طور معمول در هر دور تا 8000 پالس و حتی بیشتر (در برخی موارد خاص تا 65000 پالس) تولید می نمایند در نتیجه حد تفکیک بسیار خوبی دارند. مشکل عمده دیسک انکودرهای افزایشی عدم توانایی ایجاد یک موقعیت ثابت در زمان قطع و وصل تغذیه است و تا نقطه شروع روی دیسک مشخص نشود تشخیص جابجایی مطلق میسر نخواهد بود که این مشکل توسط انکودرهای مطلق بر طرف شده است.
خروجی انکودر های افزایشی
انکودرهای افزایشی چند نوع خروجی مختلف دارند :
- Line Driver
- NPN open collector
- Totem pole (push pull)
خروجی Line Driver
این خروجی یک سیگنال دیفرانسیلی است و برای هر کانال دو خروجی مجزا نیاز دارد. آرایش متداول سیم ها A′، A، B′، B و … است. وقتی کانال A روشن است، در واقع ولتاژ مثبتی بین A و ′A وجود دارد. همچنین زمانی که کانال A خاموش است، اختلاف ولتاژ منفی بین A و ′A وجود دارد. اندازه اختلاف ولتاژ بزرگتر از ۲.۵ ولت خواهد بود. این در مورد کانال های B و Z نیز صدق می کند. خروجی های لاین درایور سیگنالی با کیفیت و نویز کم ایجاد می کند.
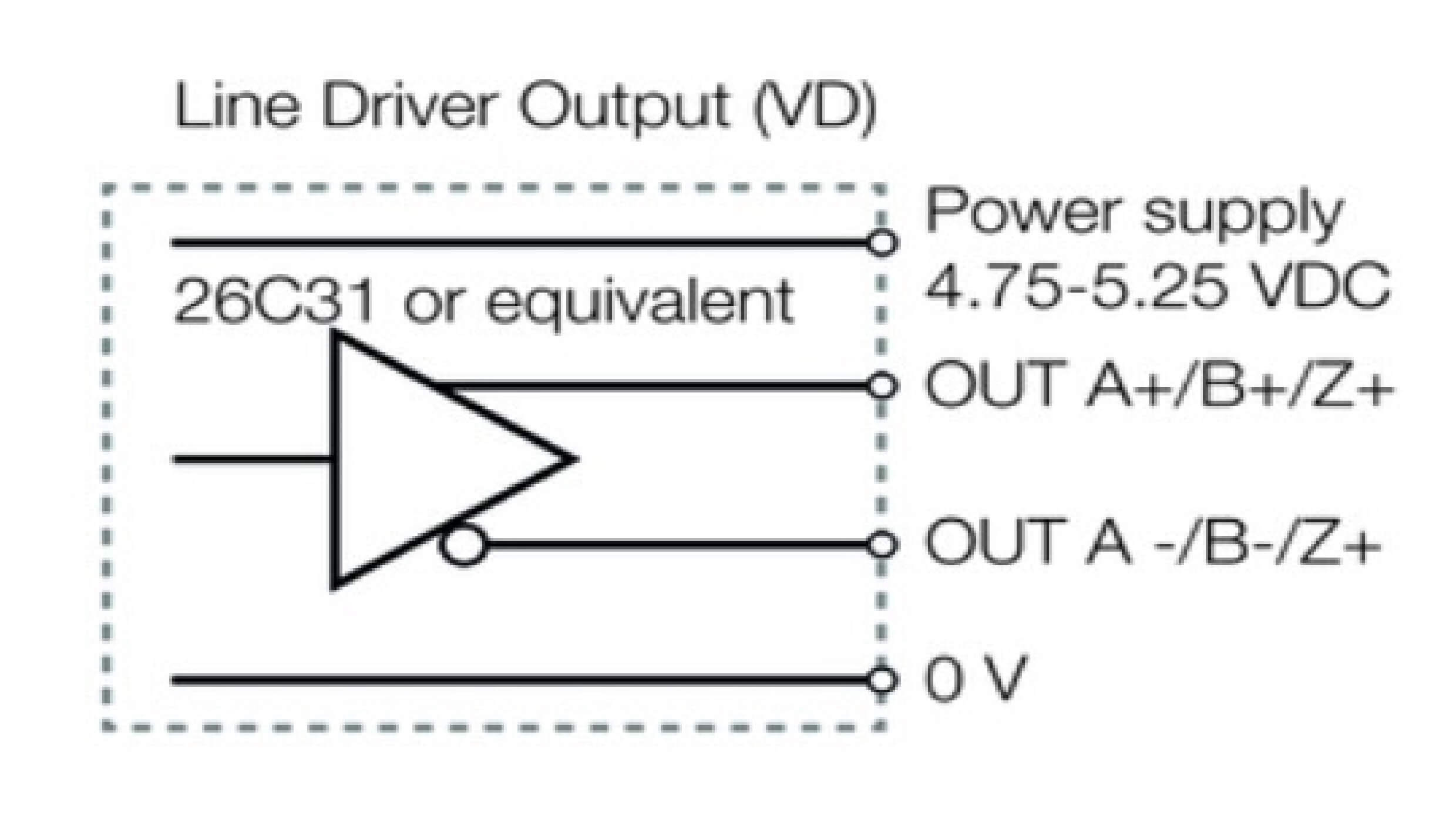
مدار خروجی Line Driver در انکودر
خروجی NPN open collector
این نوع خروجی از ورودی های PLC جریان می کشد. یک انکودر open collector دارای سیم های A، B و Z و ۰ ولت است. این نوع از انکودرها گستره وسیعی از ولتاژ را می پذیرند.
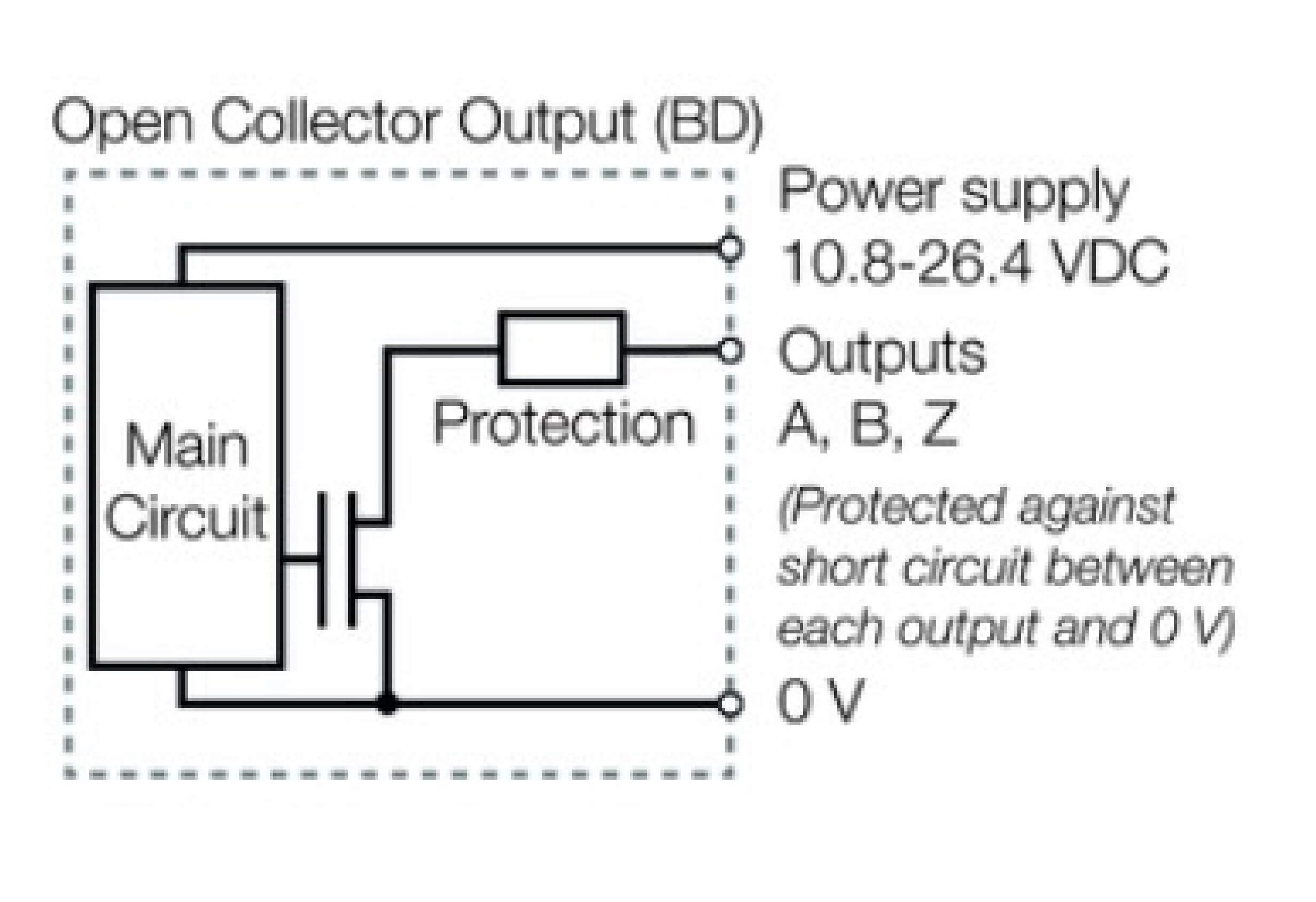
مدار خروجی NPN open collector در انکودر
خروجی Totem pole (push pull)
انکودر با خروجی Totem pole دارای مداری خاص است که می تواند به PLC جریان بدهد یا جریان بکشد. نکته مهم در مورد مدار این انکودر، استفاده از یک جفت ترانزیستور است. هنگامی که یکی از ترانزیستور ها روشن است، ترانزیستور دیگری خاموش است. به طور مثال در شکل زیر اگر PLC جریان تزریق کند (ورودی PNP)، انکودر می تواند از طریق ترانزیستور پایینی جریان بکشد. و چنانچه PLC جریان بکشد (ورودی NPN) ، انکودر از طریق ترانزیستور بالایی جریان را تأمین می کند.
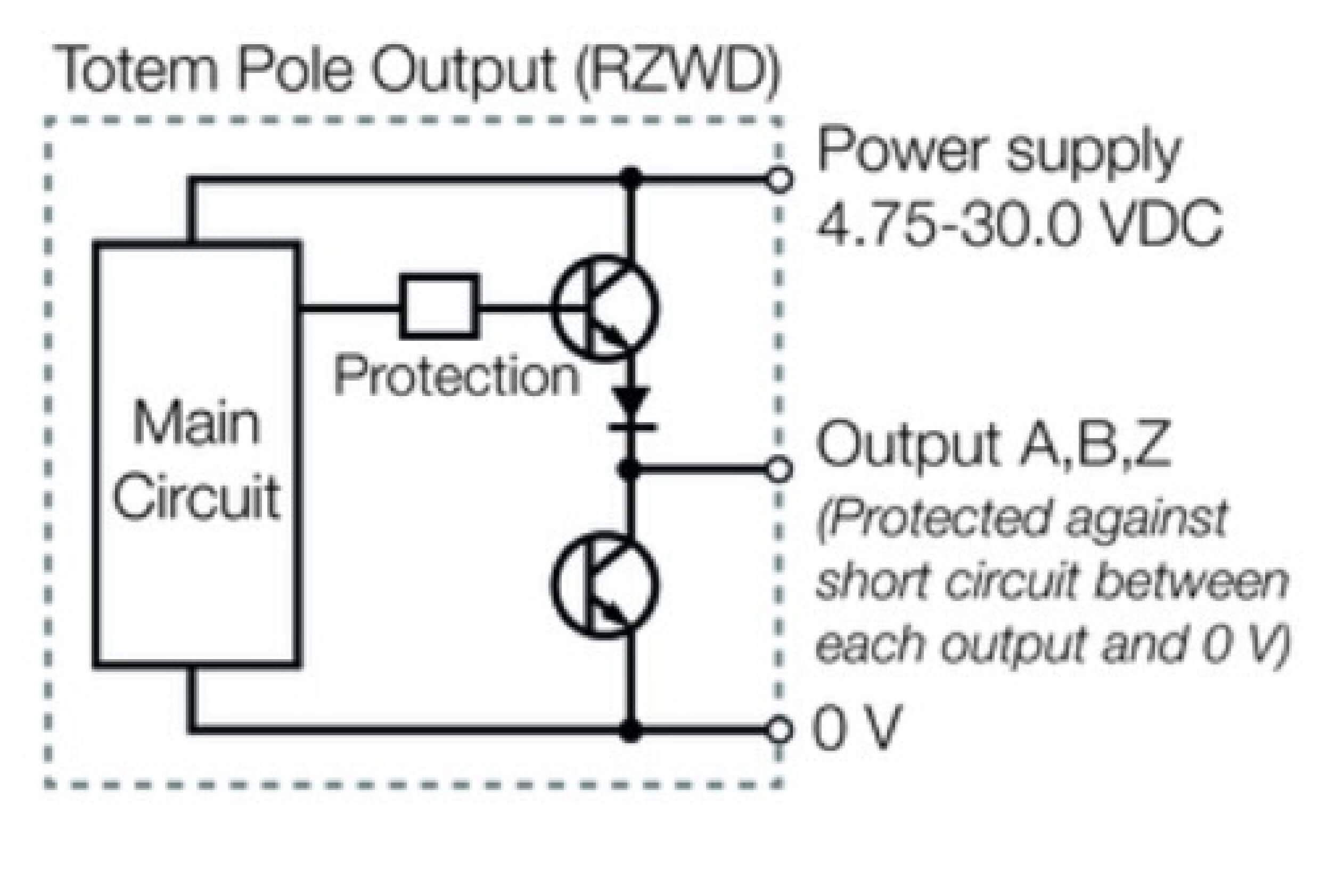
مدار خروجی توتم پل (Totem pole) در انکودر
انکودر مطلق (Absolute Encoder)
دیسک مورد استفاده در انکودرهای مطلق از تعدادی شیار هم مرکز تشکیل شده است که شیار های آن طبق نظم خاصی قرار گرفته اند و با چرخش دیسک کدهای مشخصی را تولید می کند که این کدها بیانگر موقعیت خاصی می باشد. شکل زیر چند نمونه انکودر مطلق را نشان می دهد.

شکل ساده دیسک انکودر های مطلق
همان طور که مشخص است در این نوع انکودر در صورتی که تغذیه قطع شود، با وصل مجدد تغذیه بی درنگ کد صحیح موقعیت دیسک آشکار می شود. انکودرهای مطلق برای کنترل موقعیت کارایی بالاتری نسبت به انکودرهای افزایشی دارند و معمولاً برای سرعت های پایین در تجهیزاتی که برای مدت زیادی روشن می باشند و تجهیزاتی که تغذیه آنها مکرر قطع و وصل می شود به عنوان مثال، کنترل سطح، کنترل تلسکوپ ها، کنترل جرثقیل های بزرگ و کنترل وضعیت چرخش در مفاصل بازو های روبات های صنعتی و … مورد استفاده قرار می گیرند. دیسک هایی که تعداد شیار های آنها بیشتر می باشد تغییر محدودی در زاویه را تشخیص می دهند، این بدین معنی است که هر چه تعداد شیار ها بیشتر باشد رزولوشن (حد تفکیک پذیری) و همچنین دقت انکودر بیشتر است.
به طور مثال یک دیسک با چهار مسیر مجزا، چهار بیت باینری را ایجاد می کند و دیسک به مقطع های ۲۲.۵ درجه ای تقسیم می شود، در صورتی که مقطع های کوچکتری نیاز باشد می بایست از دیسک هایی با تعداد مسیر مجزای بیشتری استفاده کرد. به طور معمول دیسک های مطلق دارای ۶ تا ۲۰ مسیر مجزا دارند که هر مسیر مجزا یک بیت دودویی (باینری) را ایجاد می کند در نتیجه رزولوشن به طور معمول بین ۶۴ تا ۱۰۴۸۵۷۶ بیت بر یک دور کامل می باشد. انکودرهای مطلق قادر به استفاده از چندین هزار کد مختلف هستند اما معمول ترین آنها کد گری (Gray code) و کد باینری (Binary Code) می باشد. شکل زیر دو نمونه دیسک با کد باینری و کد گری را نشان می دهد.
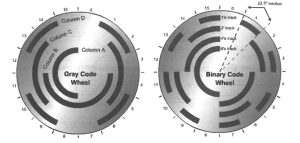
دو نمونه دیسک انکودر با کدهای باینری و گری
جدول ارائه شده زیر نحوه کد گذاری کد گری و باینری را با یکدیگر مقایسه می نماید. در کد گذاری باینری معمولا ممکن است چندین بیت در یک جابجایی تغییر کند.
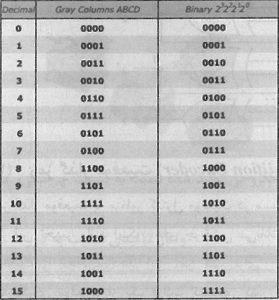
جدول کدگذاری کدهای گری و باینری
به طور مثال در وضعیت های 0111 و 1000 همزمان چهار تغییر را شاهد هستیم، به دلیل اینکه احتمال دارد دقیقاً در یک لحظه تمامی بیت ها تغییر وضعیت ندهند احتمال خطا در خواندن کدها زیاد می باشد. شکل زیر این وضعیت را نشان می دهد.
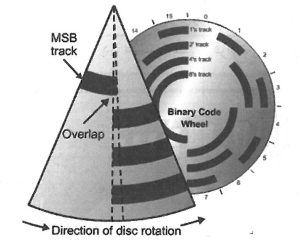
احتمال بوجود آمدن خطا در کدهای باینری و گری
در صورت استفاده از کد گری به جای کد باینری مشکل خواندن کد اشتباه پیش نمی آید، زیرا در این کد گذاری در هر قطاع فقط یک بیت تغییر وضعیت می دهد بنابراین در خروجی بیش از یک بیت احتمال خطا نخواهیم داشت. دقت شود که امکان تبدیل کد گری به باینری و بر عکس وجود دارد. مدار زیر تبدیل کد باینری به گری را نشان می دهد.
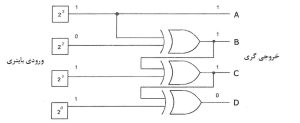
نقشه مدار تبدیل کد باینری به گری
مدار شکل زیر تبدیل کد گری به باینری را نشان می دهد.
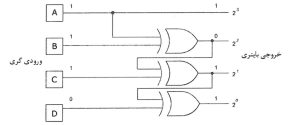
نقشه مدار تبدیل کد گری به باینری
انکودرها از لحاظ نوع شفت
انکودرها از نظر دارا بودن شفت به دو دسته شفت دار و بدون شفت (Hollow Shaft) تقسیم می شوند. انکودرهای دارای شفت معمولا با یک کوپلینگ به شفت الکترو موتور متصل می شوند. یکی از مشکلات انکودرهای دارای شفت، بروز خطا در پی جا به جایی شفت انکودر نسبت به شفت الکترو موتور است. در مقابل انکودرهای بدون شفت (هالو شفت) سازگاری بیشتری از نظر شکل و اندازه با الکترو موتور ها دارند و به راحتی با شفت آن ها با قطر های مختلف کوپل می شوند.

نمونه ای از انکودر بدون شفت

نمونه ای از انکودر شفت دار
به جز مواردی که در بالا ذکر شد، انکودرهای هالو شفت مزایای دیگری نیز دارند که عبارت است از :
- عدم احتیاج به اتصالات خارجی
- مقاومت بیشتر در برابر ضربه و لرزش
- نصب آسان و قرارگیری در مکان زاویه ای مناسب
- اندازه گیری آسان تر سرعت با توجه به ساختار مناسب
انواع تکنولوژی به کار رفته در انکودرها
انکودر نوری
انکودرهای نوری با استفاده از دو یا سه جفت LED کار می کنند. به این ترتیب که نور تابیده شده از LED ها توسط دیسک دایره ای شکل (که دارای سوراخ های متعددی است) قطع و وصل می شود. سپس سیگنال الکتریکی (پالس) متناسب با نور قطع و وصل شده تولید می شود. انکودرهای نوری، رایج ترین و دقیق ترین نوع انکودرها هستند. در انتخاب انکودرهای نوری باید به حفاظت های آن در برابر شرایط محیطی از جمله گرد و غبار و لرزش دقت کرد. چرا که این عوامل، عملکرد این انکودرها را دچار اختلال می کند.
انکودر نوری
انکودر مغناطیسی
انکودرهای مغناطیسی، براساس تغییر شار مغناطیسی توسط چرخش آهنربا (با یک یا چند جفت قطب) که در مقابل یک سنسور قرار دارد، کار می کنند. معمولاً آهنربا در شفت انکودر قرار می گیرد. تغییر میدان مغناطیسی توسط سنسور نمونه برداری و به پالس الکتریکی تبدیل می شود.
انکودر مغناطیسی
مزیت اصلی انکودرهای مغناطیسی عدم تماس در مکانیزم کاری آن ها است که مانع اصتحکاک و سایش می شود. بنابراین از نظر هزینه بسیار مناسب است، زیرا به تعمیر و نگهداری نیاز ندارد و از دوام مناسبی برخوردار است. انکودرهای مغناطیسی مخصوصاً برای کاربرد های سنگین که نیاز به استحکام بالا، سرعت و طیف گسترده ای از دما دارند، مناسب هستند. این انکودرها در عین حال از اطمینان بسیار خوبی در تولید سیگنال الکتریکی برخوردارند.
انکودر خازنی
انکودرهای خازنی از تغییر در مقدار ظرفیت خازن به عنوان ابزاری برای اندازه گیری جا به جایی بهره می برد. به طور معمول المان های اصلی سنسور خازنی به گونه ای تنظیم می شوند که خازن به عنوان یک عنصر متحرک نسبت به صفحات ثابت خازن حرکت کند.
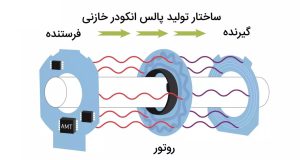
انکودر خازنی
مثال هایی از کاربرد انکودر
- جرثقیل ها : انکودرهای مورد استفاده در شفت موتور یک جرثقیل می تواند با ارسال سیگنال خروجی، موقعیت یابی بار جرثقیل را ممکن سازد. این موضوع به جرثقیل کمک می کند تا در هنگام برداشتن، حمل و رها سازی بار به درستی عمل کند.
- آسانسور ها : از کاربرد های دیگر انکودر می توان به استفاده از آن ها در آسانسور ها اشاره کرد. این انکودرها هستند که با پالس های خروجی به سیستم های کنترلی کمک می کنند تا آسانسور درست در برابر درب متوقف شود.
- دوربین های مدار بسته : انکودرها همچنین می توانند برای کنترل حرکت موتور دوربین های مدار بسته و همین طور حرکت دکل های مخابراتی مورد استفاده قرار گیرند.
- از کاربرد های دیگر انکودرها می توان به استفاده گسترده آن ها در ربات ها به عنوان تعیین موقعیت مناسب بازوهای ربات، استفاده در سروو موتور ها به عنوان تعیین موقعیت شفت موتور، استفاده در نوار نقاله برای تعیین درست موقعیت توقف و حرکت نوار نقاله، استفاده به عنوان اندازه گیری طول در خطوط تولید موادی مانند کاغذ، پارچه، پلاستیک و … اشاره کرد.
انکودرها در شکل های گوناگونی تولید می شوند که مرسوم ترین آن ها انکودرهای شفت دار و بدون شفت است که در این مقاله مفصل در مورد آن ها توضیح داده شد. از دیگر مدل های انکودر می توان به انکودرهای چرخ دار، انکودرهای دستی، انکودرهای دستی پرتابل و موارد دیگر اشاره کرد که اساس کار همه آن ها یکسان است فقط در کاربرد با هم متفاوتند.

نمونه ای از انکودر چرخ دار یا کالسکه ای

انکودر دستی برای ورود پالس به صورت دستی در ماشین های CNC

نمونه ای از انکودر دستی قابل حمل برای ورود پالس به صورت دستی در ماشین های CNC